
Cela passe juste sur une A110 mais ça passe !!!
Ces bobines crayon Bosch Single Fire 0221 604103 comportent chacune leur circuit de puissance ( "driver, certainement un triple Darlington car elles consomment 15 mA, alors qu’un IGBT ne consommerait quasi rien).
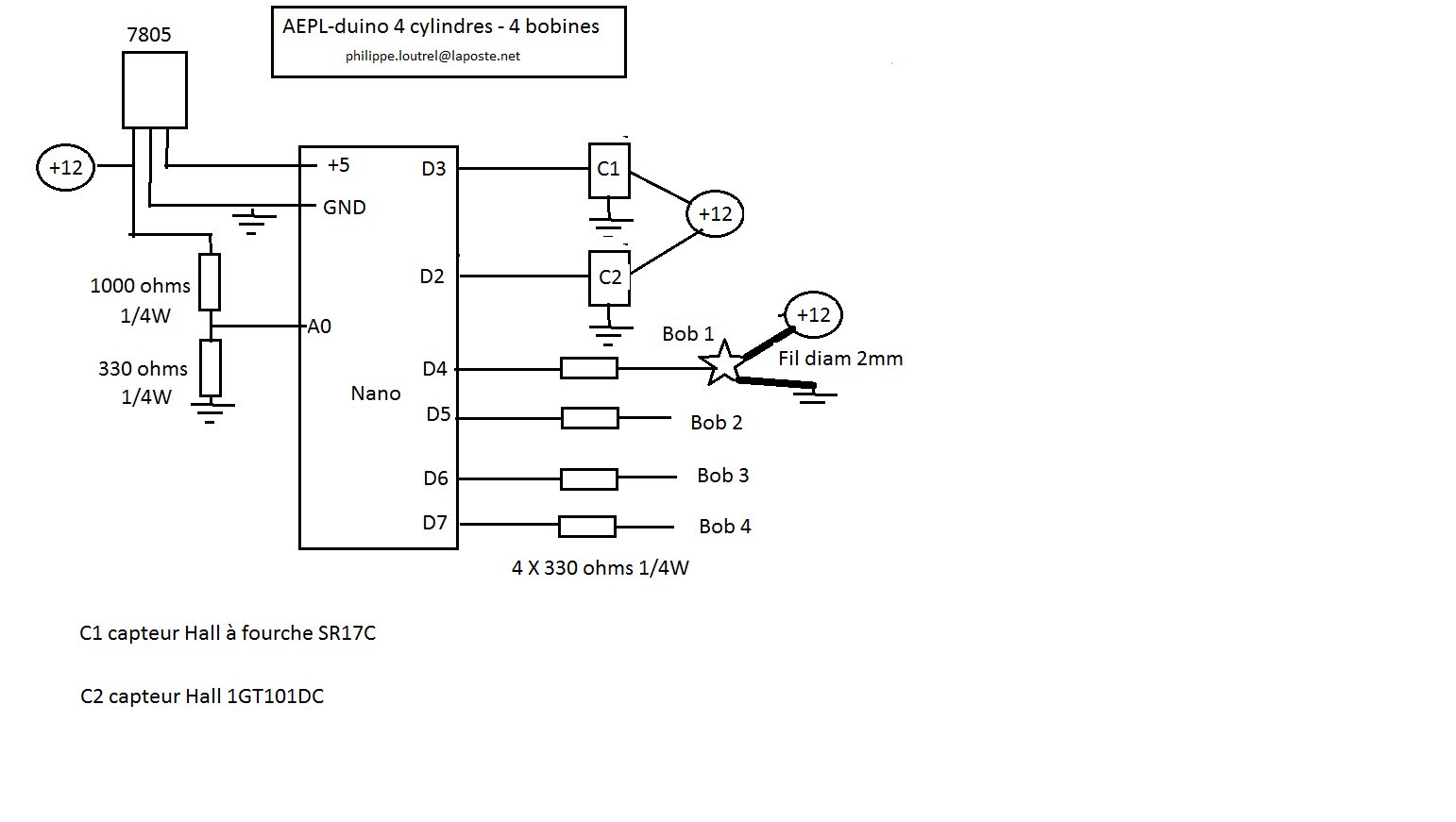
Elles peuvent donc être pilotées directement par l’Arduino Nano.
Les deux cibles sur la poulie en bout de vilo doivent générer tour à tour les étincelle 1, 3, 4 et 2. Pour cela il est nécessaire de connaitre la position du cylindre 1, ce que seul l’arbre à cames peut détecter.
D’où la nécessité de l’allumeur modifié, avec un capteur Hall et une pale qui détecte ( environ 70° avant le PMH allumage du cylindre 1 ) l’arrivée de celui ci.
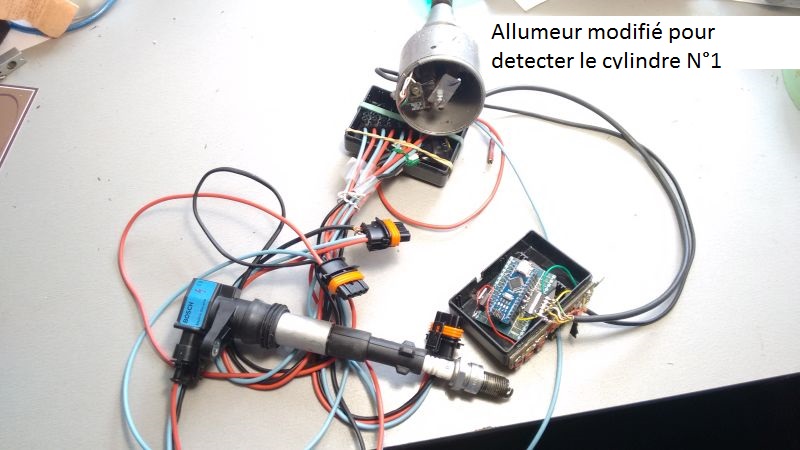
Ceci permet au logiciel de se synchroniser et d’activer la bobine 1 au premier passage d’une cible.
Les bobines 3,4,et 2 sont ensuite activées séquentiellement à chaque cible, puis on se met en attente du signal du cylindre 1 pour recommencer une séquence.
Le courant monte à 7 A en 2 ms sous 12 V. Pour les tensions inférieures on augmente ce temps de "dwell", à 3.5 ms par exemple sous 10 V au démarrage.La valeur de la tension est lue via un diviseur et l’entrée analogique A0 du Nano.
La lecture s’effectue juste avant la coupure du courant pour étincelle, au moment où le courant est maximal donc la tension est la plus faible.Une correction linéaire est appliquée entre 9 V et 12 V, la valeur de 2 ms étant gardée constante au delà de 12 V.
Logiciel
|
Aep_duino_17-04-17__4_bobines-et-capteur_pour_cylindre_1
|
Annexe Solution sans allumeur
Une autre solution a été expérimentée, sans utiliser l’allumeur, avec une seule cible (cylindre 1/4), et l’activation des bobines 1/4 et 3/2 en parallèle, c’est à dire avec étincelle perdue (comme sur les 2CV Citroën par exemple).
La generation des étincelles 3/2 n’étant plus commandée par une cible, celle ci est calculée par logiciel.
La fiabilité de cette solution paraissant moindre, c’est la solution avec allumeur qui a été préférée.
